
Flywheel Pendulum
The flywheel pendulum is an underactuated mechanical system. It involved hardware implementation, mechanical modeling, dynamic simulation, and nonlinear control — providing a hands-on application of control theory in an experimental setting.
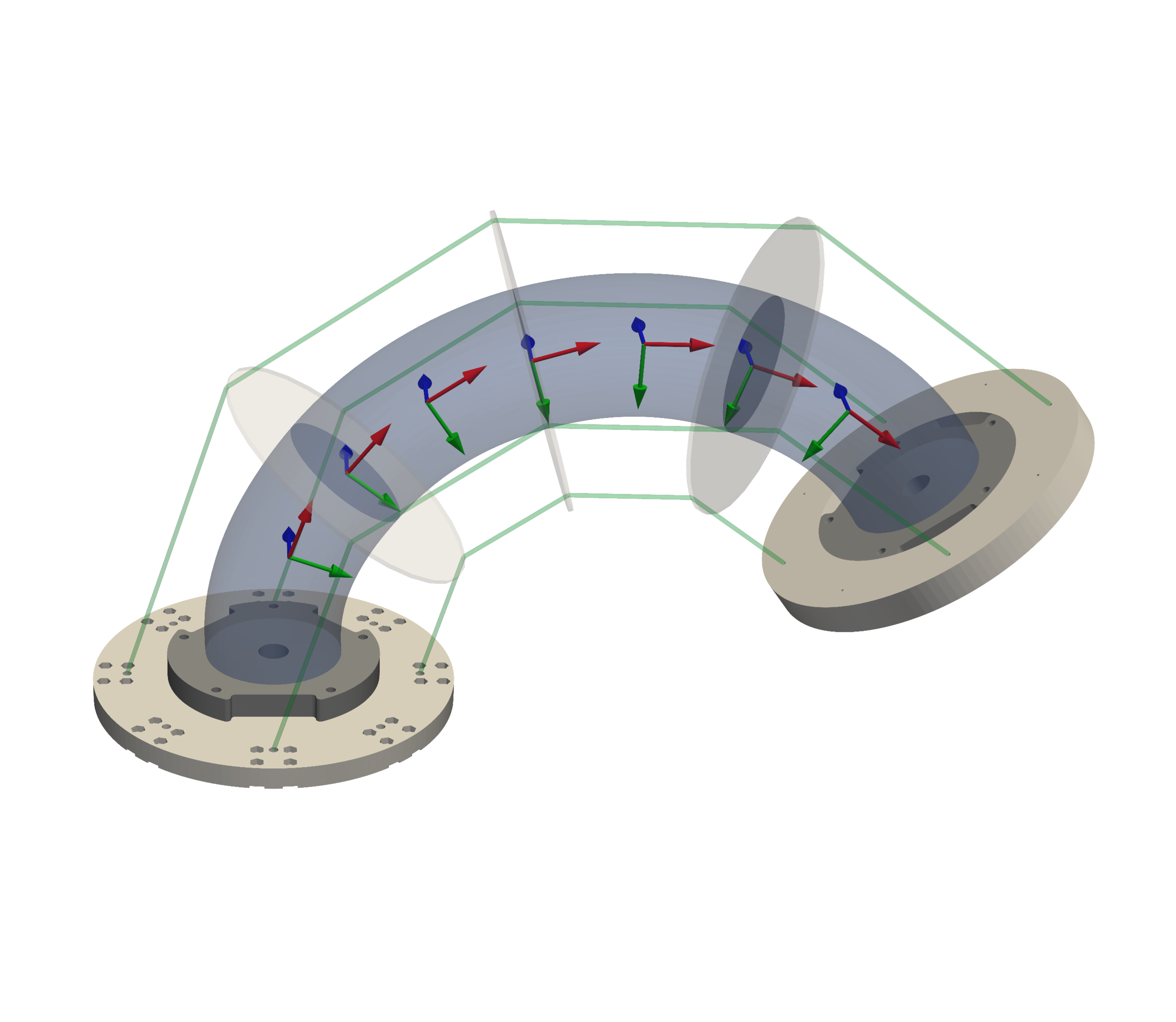
Tendon-Driven Continuum Robots
My current research focuses on tendon-driven continuum robots, with ongoing work in mechanical modeling based on Cosserat rod theory and the development of nonlinear control strategies.
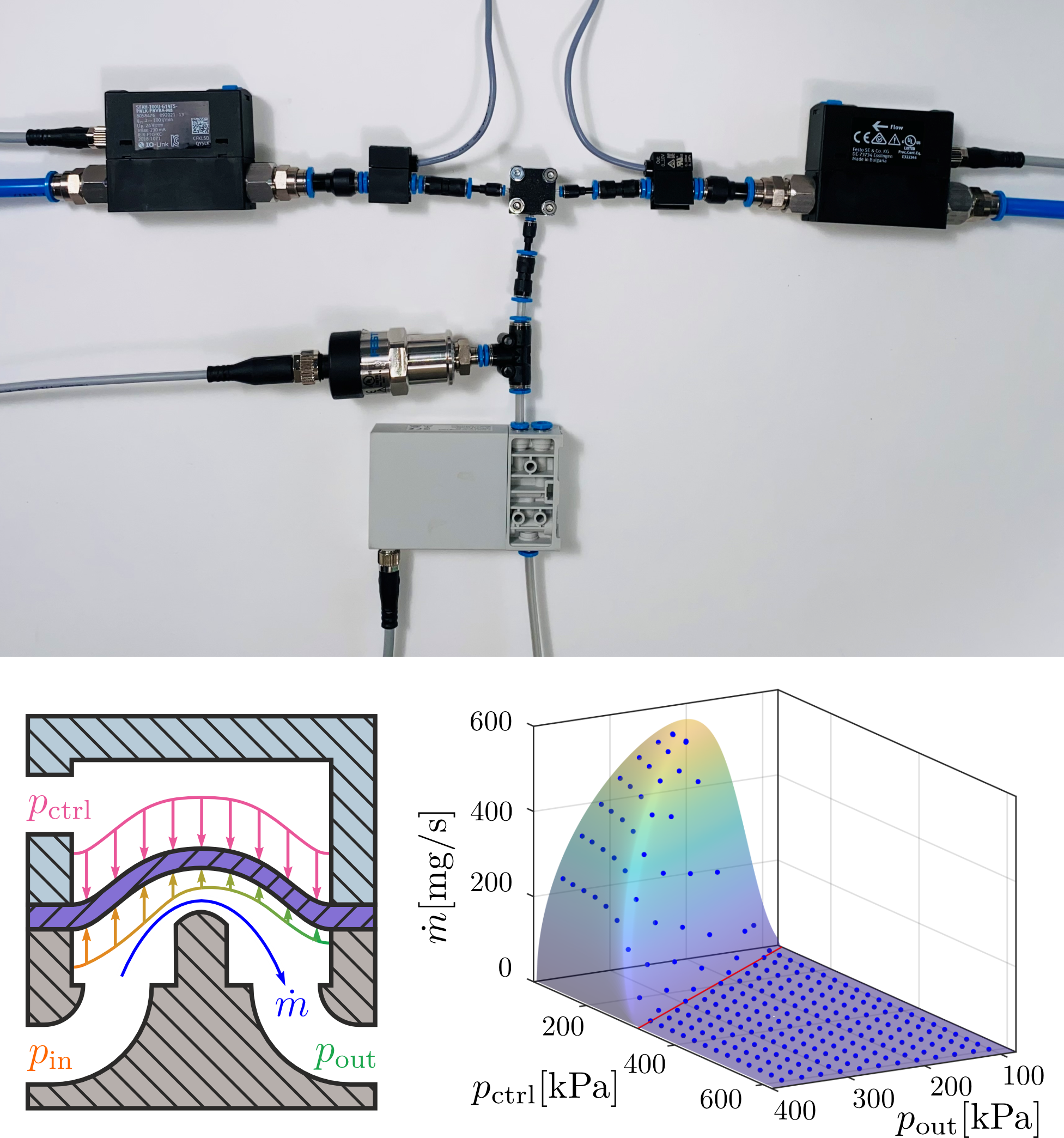
High-Flow Fluid-Driven Membrane Valves
This project focused on modeling high-flow membrane valves by coupling simplified membrane mechanics with turbulent flow dynamics. The model was experimentally validated, providing a theoretical basis for the design and control of membrane valves in pneumatic soft robotic systems.